Wireless MEMS inclination sensor
The objective of the project is the field implementation of an inclinometer with a digital MEMS (micro-electro-mechanical system) inclination sensor developed in the laboratory.
The low-cost MEMS MPU-6050 sensor which incorporates a 3-axes gyroscope and a 3-axes accelerometer in a single chip, has been used successfully as a stationary inclinometer/tiltmeter in the laboratory; albeit lack of precision of each sensor which is taken into account by filtering methods. More specifically, despite its very fast and accurate response the gyroscope suffers from drift bias and noise while the raw data of the accelerometer, influenced by inertial forces, lack precision. A complementary filter, obtained after extensive trials, was used to estimate the inclination angle in presence of uncertainty by taking 97% of the integrated gyroscope data and add 3% of the angle calculated by the accelerometer data. Calibration of the sensor in the laboratory indicates a maximum error of 0.15 % in the estimated angle.
To minimize the error in the sensor’s measurements the Kalman filter estimation algorithm is being implemented in the Python code as well as through use of artificial neural networks in two steps: the prediction step where based on previous measurements the next state of the system is predicted, followed by the update step where the current state of the system is estimated taking into account the measurement at the current time step.
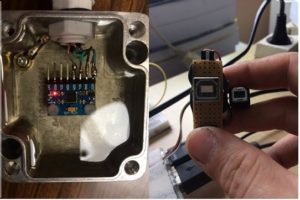
Apart from its low cost, insufficient monitoring frequency of traditional inclinometers is overcome by the new sensor via online transmission of tilt angle data in real-time, by connecting to an also low-cost Raspberry Pi-3B+ microcomputer. The transmission of data is made to appear in near real-time via an online API developed in Python, by remotely connecting to the microcomputer’s (host’s) IP address through any Internet connected device. The developed software also implements a user-controllable data logging capability, along with time-decided graph generation for angle and temperature values, all of which can work in the interest of monitoring in geotechnical applications.